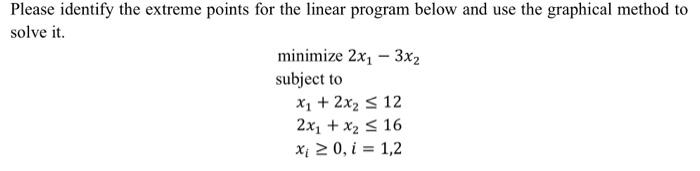
In mathematics, an extreme point of a convex set in a real or complex vector space is a point in that does not lie in any open line segment joining two points of The extreme points of a line segment are called its endpoints. In linear programming problems, an extreme point is also called vertex or corner point of
Definition
Throughout, it is assumed that is a real or complex vector space.
For any say that lies between and if and there exists a such that
If is a subset of and then is called an extreme point of if it does not lie between any two distinct points of That is, if there does not exist and such that and The set of all extreme points of is denoted by
Generalizations
If is a subset of a vector space then a linear sub-variety (that is, an affine subspace) of the vector space is called a support variety if meets (that is, is not empty) and every open segment whose interior meets is necessarily a subset of A 0-dimensional support variety is called an extreme point of
Characterizations
The midpoint of two elements and in a vector space is the vector
For any elements and in a vector space, the set is called the closed line segment or closed interval between and The open line segment or open interval between and is when while it is when The points and are called the endpoints of these interval. An interval is said to be a non−degenerate interval or a proper interval if its endpoints are distinct. The midpoint of an interval is the midpoint of its endpoints.
The closed interval is equal to the convex hull of if (and only if) So if is convex and then
If is a nonempty subset of and is a nonempty subset of then is called a face of if whenever a point lies between two points of then those two points necessarily belong to
Examples
If are two real numbers then and are extreme points of the interval However, the open interval has no extreme points. Any open interval in has no extreme points while any non-degenerate closed interval not equal to does have extreme points (that is, the closed interval's endpoint(s)). More generally, any open subset of finite-dimensional Euclidean space has no extreme points.
The extreme points of the closed unit disk in is the unit circle.
The perimeter of any convex polygon in the plane is a face of that polygon. The vertices of any convex polygon in the plane are the extreme points of that polygon.
An injective linear map sends the extreme points of a convex set to the extreme points of the convex set This is also true for injective affine maps.
Properties
The extreme points of a compact convex set form a Baire space (with the subspace topology) but this set may fail to be closed in
Theorems
Krein–Milman theorem
The Krein–Milman theorem is arguably one of the most well-known theorems about extreme points.
For Banach spaces
These theorems are for Banach spaces with the Radon–Nikodym property.
A theorem of Joram Lindenstrauss states that, in a Banach space with the Radon–Nikodym property, a nonempty closed and bounded set has an extreme point. (In infinite-dimensional spaces, the property of compactness is stronger than the joint properties of being closed and being bounded.)
Edgar’s theorem implies Lindenstrauss’s theorem.
Related notions
A closed convex subset of a topological vector space is called strictly convex if every one of its (topological) boundary points is an extreme point. The unit ball of any Hilbert space is a strictly convex set.
k-extreme points
More generally, a point in a convex set is -extreme if it lies in the interior of a -dimensional convex set within but not a -dimensional convex set within Thus, an extreme point is also a -extreme point. If is a polytope, then the -extreme points are exactly the interior points of the -dimensional faces of More generally, for any convex set the -extreme points are partitioned into -dimensional open faces.
The finite-dimensional Krein–Milman theorem, which is due to Minkowski, can be quickly proved using the concept of -extreme points. If is closed, bounded, and -dimensional, and if is a point in then is -extreme for some The theorem asserts that is a convex combination of extreme points. If then it is immediate. Otherwise lies on a line segment in which can be maximally extended (because is closed and bounded). If the endpoints of the segment are and then their extreme rank must be less than that of and the theorem follows by induction.
See also
- Extreme set
- Exposed point
- Choquet theory – Area of functional analysis and convex analysis
- Bang–bang control
Citations
Bibliography
- Adasch, Norbert; Ernst, Bruno; Keim, Dieter (1978). Topological Vector Spaces: The Theory Without Convexity Conditions. Lecture Notes in Mathematics. Vol. 639. Berlin New York: Springer-Verlag. ISBN 978-3-540-08662-8. OCLC 297140003.
- Bourbaki, Nicolas (1987) [1981]. Topological Vector Spaces: Chapters 1–5. Éléments de mathématique. Translated by Eggleston, H.G.; Madan, S. Berlin New York: Springer-Verlag. ISBN 3-540-13627-4. OCLC 17499190.
- Paul E. Black, ed. (2004-12-17). "extreme point". Dictionary of algorithms and data structures. US National institute of standards and technology. Retrieved 2011-03-24.
- Borowski, Ephraim J.; Borwein, Jonathan M. (1989). "extreme point". Dictionary of mathematics. Collins dictionary. HarperCollins. ISBN 0-00-434347-6.
- Grothendieck, Alexander (1973). Topological Vector Spaces. Translated by Chaljub, Orlando. New York: Gordon and Breach Science Publishers. ISBN 978-0-677-30020-7. OCLC 886098.
- Halmos, Paul R. (8 November 1982). A Hilbert Space Problem Book. Graduate Texts in Mathematics. Vol. 19 (2nd ed.). New York: Springer-Verlag. ISBN 978-0-387-90685-0. OCLC 8169781.
- Jarchow, Hans (1981). Locally convex spaces. Stuttgart: B.G. Teubner. ISBN 978-3-519-02224-4. OCLC 8210342.
- Köthe, Gottfried (1983) [1969]. Topological Vector Spaces I. Grundlehren der mathematischen Wissenschaften. Vol. 159. Translated by Garling, D.J.H. New York: Springer Science & Business Media. ISBN 978-3-642-64988-2. MR 0248498. OCLC 840293704.
- Köthe, Gottfried (1979). Topological Vector Spaces II. Grundlehren der mathematischen Wissenschaften. Vol. 237. New York: Springer Science & Business Media. ISBN 978-0-387-90400-9. OCLC 180577972.
- Narici, Lawrence; Beckenstein, Edward (2011). Topological Vector Spaces. Pure and applied mathematics (Second ed.). Boca Raton, FL: CRC Press. ISBN 978-1584888666. OCLC 144216834.
- Robertson, Alex P.; Robertson, Wendy J. (1980). Topological Vector Spaces. Cambridge Tracts in Mathematics. Vol. 53. Cambridge England: Cambridge University Press. ISBN 978-0-521-29882-7. OCLC 589250.
- Rudin, Walter (1991). Functional Analysis. International Series in Pure and Applied Mathematics. Vol. 8 (Second ed.). New York, NY: McGraw-Hill Science/Engineering/Math. ISBN 978-0-07-054236-5. OCLC 21163277.
- Schaefer, Helmut H.; Wolff, Manfred P. (1999). Topological Vector Spaces. GTM. Vol. 8 (Second ed.). New York, NY: Springer New York Imprint Springer. ISBN 978-1-4612-7155-0. OCLC 840278135.
- Schechter, Eric (1996). Handbook of Analysis and Its Foundations. San Diego, CA: Academic Press. ISBN 978-0-12-622760-4. OCLC 175294365.
- Trèves, François (2006) [1967]. Topological Vector Spaces, Distributions and Kernels. Mineola, N.Y.: Dover Publications. ISBN 978-0-486-45352-1. OCLC 853623322.
- Wilansky, Albert (2013). Modern Methods in Topological Vector Spaces. Mineola, New York: Dover Publications, Inc. ISBN 978-0-486-49353-4. OCLC 849801114.